Op deze pagina worden alle gangbare en minder gangbare drone termen als definitie uitgelegd. Denk dan aan gps, return to home, follow me, nd filter, hyperlapse, brushless motor, etc.
Omdat de ene drone term nog exclusiever/deftiger klinkt dan de andere term gaan we een mooi overzicht maken met alle drone gerelateerde termen/afkortingen. Zodat het voor iedereen duidelijk is wat ermee bedoeld wordt. Deze lijst zal dan ook door de tijd worden aangevuld met nieuwe termen/afkortingen.
- Altitude hold/Barometer; normaliter heeft een drone altijd vermogen nodig om in de lucht te blijven hangen, je geeft dus hierdoor "gas" met de linker stick. Geef je voldoende "gas" blijft de drone op 1 hoogte hangen. Met altitude hold of barometer hoef je niet steeds "gas" bij te geven. De drone handhaaft 1 hoogte zonder stick input. Wil je dalen of stijgen kun je dit alsnog zelf doen door de stick links te laten zakken of omhoog te duwen.
- Airsense system; sinds 2020 rust DJI al hun drones uit met Airsense. Met dit systeem kunnen ADS-B signalen ontvangen worden die andere toestellen/vliegtuigen/heli's, etc. uitzenden. Hierdoor wordt de piloot dus gewaarschuwd als, bijvoorbeeld een helikopter aangevlogen komt in jou vlieggebied. De piloot kan dan tijdig landen of zijn positie veranderen zodat botsingen in de lucht vermeden kunnen worden.
- Brushless motor; drones gebruiken als aandrijving een brushless of brushed motor (borstelloze of borstel motor. De Brushless motor wordt aangedreven door middel van een magnetisch veld (wisselend) tussen de magneet en de stator. Er komen dus geen draaiende delen aan te pas die elkaar aanraken. Dus geen wrijving dus minder slijtage. Brushless motors gaan dan ook langer mee dan hun brushed variant.
- Follow me; oftewel 'volg mij'. Heel simpel uitgelegd, in deze mode maak je het mogelijk om een object/persoon te volgen. Je selecteert de persoon of het object en de drone zorgt zelf dat het onderwerp in beeld blijft. Dit geeft gave beelden bij bijvoorbeeld een mountainbiker.
- FPV; of beter bekend als First Person View. Dit betekend dat je het beeld wat de drone ziet, direct kunt zien op je smartphone/controller of FPV bril. Dit geeft dus een extra dimensie tijdens het vliegen. Veel van de race drones die wel leveren hebben een FPV bril.
- GPS (Global Positioning Systems), GLONOSS, Galileo; allemaal satelliet systemen. GPS is wellicht het meest bekende systeem, dit is van de Amerikanen. Galileo en GLONOSS is van Europa, en de Russische Federatie en omvat 24 satellieten. Galileo wordt beheerd door ESA. En omvat 30 satellieten. Beidou of BDS is het meest recente systeem van de Chinezen. Vaak worden deze systemen gekoppeld met elkaar, zodat meer satellieten gevonden worden en dus een accuratere positie gewaarborgd kan worden voor de drone.
- Headless mode; Er zijn momenten dat je even helemaal geen idee hebt wat precies de voor en achterkant van de drone is tijdens het vliegen. Dit kan je stuurgedrag sterk beïnvloeden omdat, wanneer je bijv. 90 graden naar links bent gedraaid, je drone naar links zal gaan (terwijl jij naar voren wil). Met een druk op de headless mode knop, zorg je ervoor dat de rechter stick waarmee je de verticale verplaatsing bepaald, ook echt altijd naar voren gaat. Je hoeft dus geen rekening mee te houden met de voorkant van je drone. Trek je de rechter knuppel naar je toe komt de drone dus ook naar jou toe gevlogen ongeacht waar de voorzijde van de drone naar toe wijst.
- Hyperlapse; Dit is een video die opgebouwd is uit groot aantal foto's die achtereenvolgens worden gemaakt met een bepaalde tussenpozen. Je krijgt door meerdere foto's te maken om een object een video als je alle foto's samenvoegt en afspeelt versneld. Zie onderstaande video voor een aantal drone hyperlapse voorbeelden:
- Li-Po accu; oftewel een Lithium ion polymeer accu. Deze accu's mogen maar tot 3,0v worden ontladen. Kom je hieronder beschadigd de accu. Iets mindere capaciteit dan Li-ion. Maar heeft een hogere maximale piek rate. Dit wil zeggen dat het piek vermogen wat de accu kan leveren hoger is dan bij de Li-Io accu.
- Li-Io accu; oftewel een Lithium Ion accu. Deze accu's mogen maar tot 3,0v worden ontladen. Kom je hieronder beschadigd de accu. De capaciteit van de Li-io is hoger dan de Li-Po accu, maar het maximale piek vermogen weer lager dan de Li-Po accu. Racedrones die plots een hoog vermogen moeten leveren kun je dus beter met de Li-Po accu vliegen.
- Mode 1/2/3/4;
De meest gebruikelijk en gangbare manier om je drone te besturen is via een controller oftewel een afstandsbediening. Je hebt verschillende soorten instellingen, mode 1, mode 2, mode 3 en mode 4. De meest gebruikte in de EU is mode 2. Mode 1 wordt voornamelijk in Japan gebruikt.
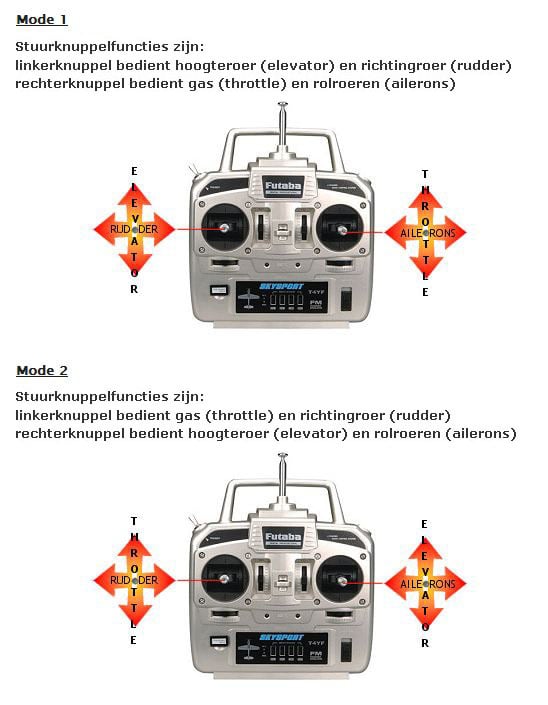
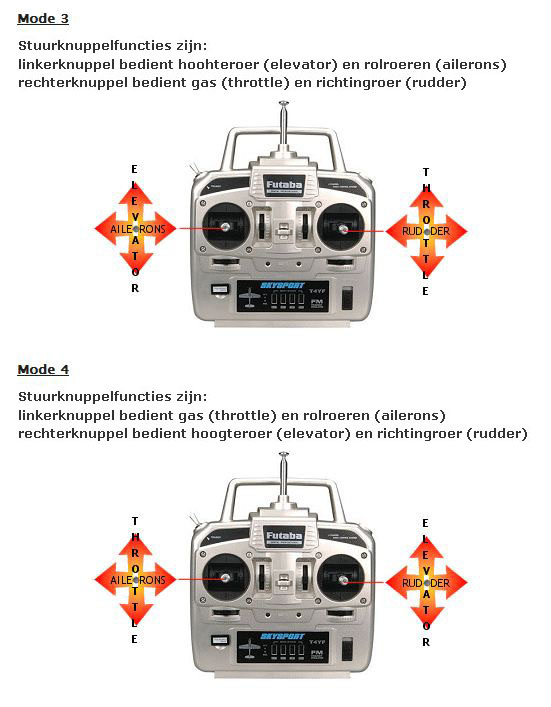
Stick mode 1 en 2 Stick mode 3 en 4
Zoals gezegd zijn er meerdere manieren om een drone te besturen. In de bovenstaande afbeeldingen zie je de verschillende soorten manieren van besturen. Om het eenvoudig te houden bespreken we alleen mode 2.
We beginnen met de linker stick wat heeft deze van functies. Als je de linkerstick omhoog duwt zal de drone opstijgen, duw je de stick omlaag zal de drone dalen en uiteindelijk landen. Deze functie heeft Throttle.
Wil je de drone om zijn eigen as laten draaien dan moet je ook de linker stick hebben en duw je deze naar links (drone draait naar links) en duw je de linker stick naar rechts (drone draait naar rechts). Deze functie heeft Yaw. Throttle en Yaw zitten dus als functie op de linker stick. Dit zie je ook in de afbeelding hieronder gebeuren.
Pitch, roll en yaw.
Linker stick behandeld, nu de rechter stick op de controller. Wat heeft deze stick als functie. Laten we beginnen met de roll functie. Als je de rechter stick naar rechts of naar links duwt, zal de drone naar links rollen, of als je deze naar rechts duwt, zal de drone naar rechts rollen.
Uiteindelijk de laatste functie is pitch forward en pitch backward. Duw je de rechter stick naar voren (dus van je af) zal de drone naar voren hellen, naar voren gaan. Duw je de stick naar achter (dus naar je toe) zal je drone naar achter hellen, naar achter gaan. Dit alles is weer terug te vinden in onderstaande afbeelding. Ik zal binnenkort een filmpje opnemen met de 4 functies nog eens uitgelegd tijdens het vliegen van de drone.
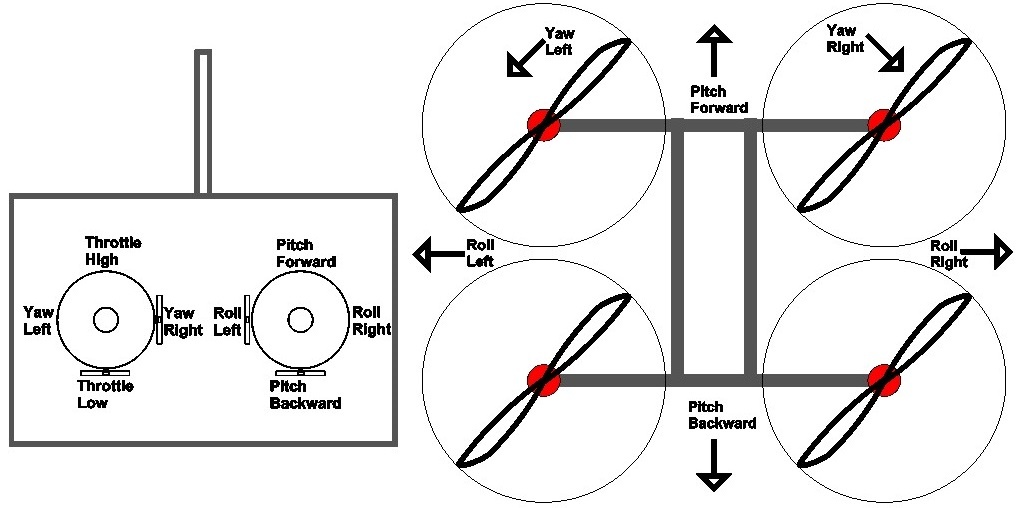
De input van de stick geeft een output beweging op de drone. Bron: Quadcopters Are Fun
- ND filter; oftewel een Neutral Densitity filter. Beter bekend als grijsfilter. Deze ND filters gebruikt men om minder licht op de sensor van de camera te laten vallen. Hierdoor krijgt je een langzamere sluitertijd wat zorgt voor cinematische beelden, zie meer info in onze andere blog omtrent de zin en onzin van ND/PL UV filters.
- One key return; dit is net een andere soort functie dan de RTH functie. One key return zit op drones zonder GPS. Als deze knop wordt geactiveerd vliegt de drone terug naar de controller. Let op dit is VEEL minder accuraat als de RTH functie, aangezien GPS beter weet waar de landlocatie zich bevindt.
- RTH (Return To Home); een knop die zorgt dat de drone naar zijn home punt - opstijglocatie terug komt vliegen. Vol automatisch. Dit is ideaal bij een noodsituatie, zoals het kwijt zijn van de drone. Je kunt deze functie ook gebruiken als je niet zelf terug willen vliegen. De drone doet dus in deze modi zelf zijn werk.
- HD, FHD 2K, 4K, 6K, etc; Deze termen geven de resolutie aan. De resolutie is opgebouwd uit een x aantal pixels. Een pixel is een punt op het scherm bestaand uit 3 puntjes: rood-blauw-groen. Hoe meer pixels er op een scherm zitten hoe hoger de resolutie. Hoe scherper dus het beeld. Dit is mooi afgebeeld in de onderstaande foto.720 x 1280 — HD (High Definition) is 720p 1920 x 1080 — FHD (Full High Definition) is 1080p 2560 x 1440 — QHD (Quad HD) is 2K 1440p 3840 x 2160 — UHD (Ultra HD) is 4K 2160p, etc




hi lucas, welk merk is dit? Stuur ons even een mailtje naar onze algemene mail met het merk. Dan kunnen we je helpen.
De gyroscoop zorgt voor het evenwicht en de kompas kalibratie voor dat de drone weet waar hij zich bevindt op de wereld.
Hallo Wouter zou jij mij de functie van de gyro willen uitleggen, omdat wij daar even een probleem mee hadden, ik he de gyro met de twee sticks weer goed gekregen. Maar zorgt de gyro voor het stabiel vliegen? bv dank Bob ( verder alles prima)